We wilden een robot die cocktails maakte.
Niet echt iets kleins. Wij gingen direct voor het grote idee: een robot die zelfstandig drankjes kan mixen. Als een echte barman.
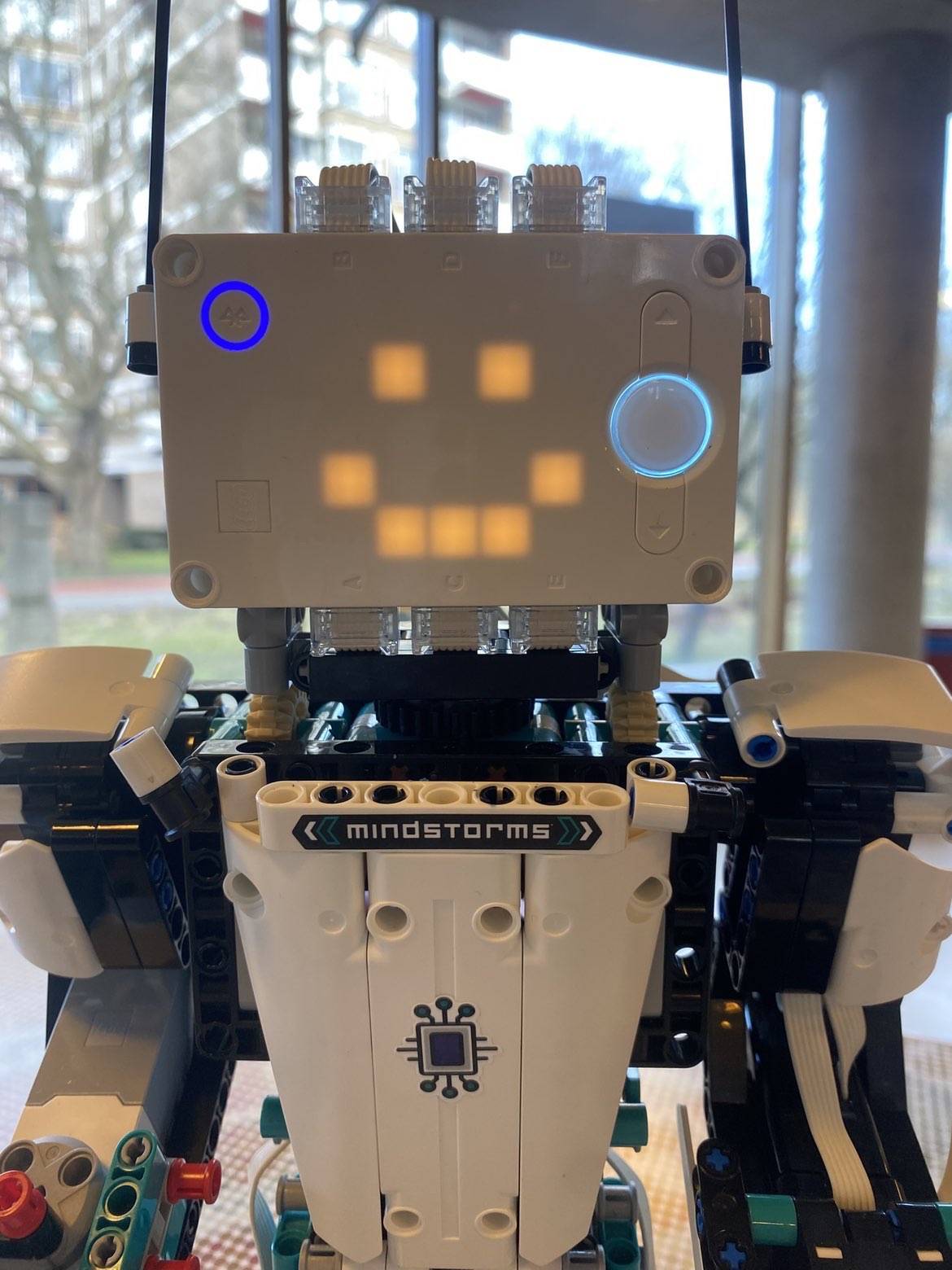
We pakten de LEGO mindstorms 51515 en bouwden Charlie, mooi, schattig en veelbelovend.
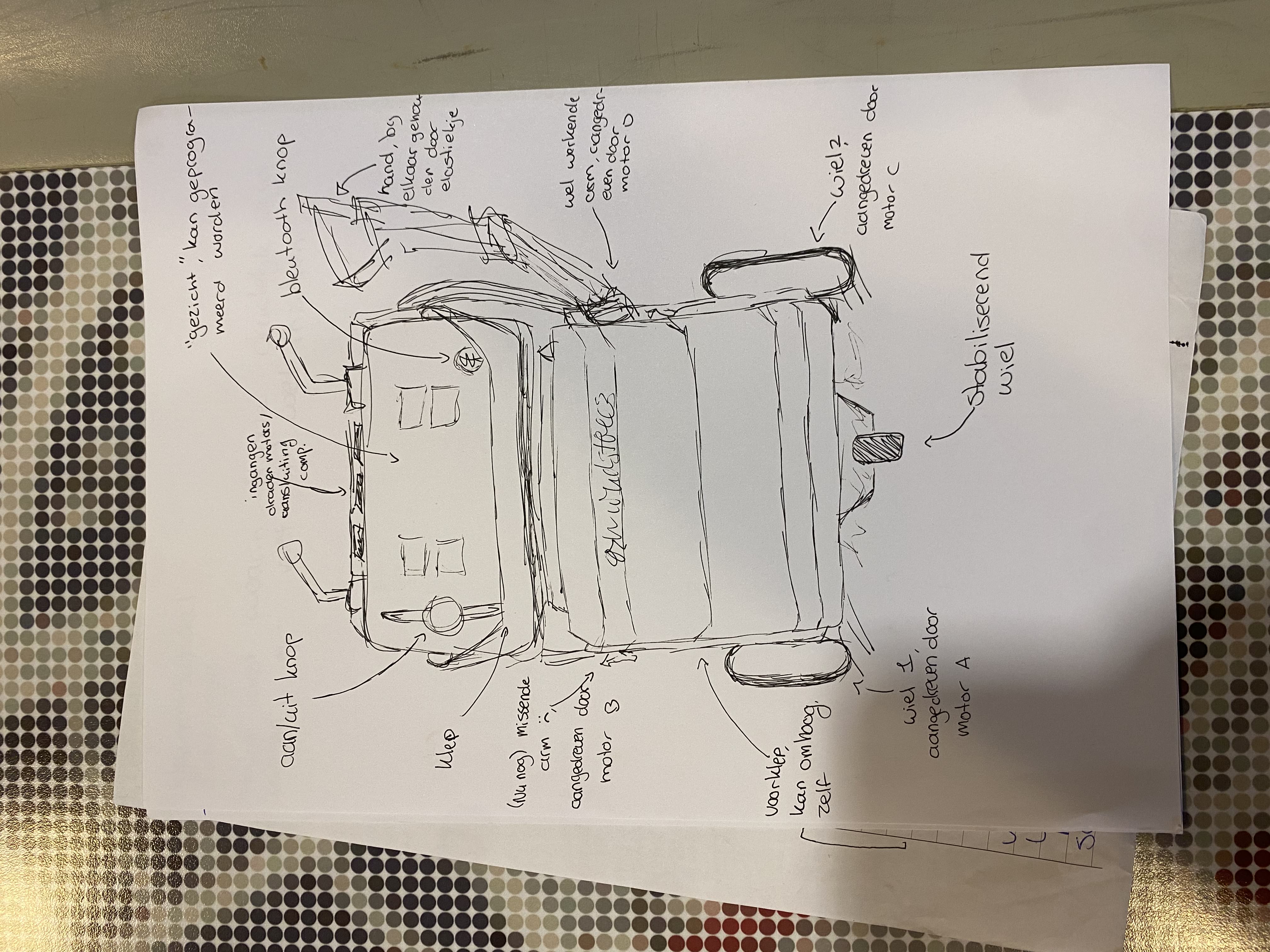
Charlie had geen grijparm.
Ten eerste was zijn rechter arm ook niet compleet, we hebben aan mevrouw Verscharen gevraagd of zij een lego stukje kon 3d printen. Het was een prima rijdende robot, maar voor cocktails had hij gewoon niet de goede onderdelen. Geen claw, geen arm, geen manier om iets echt vast te pakken.
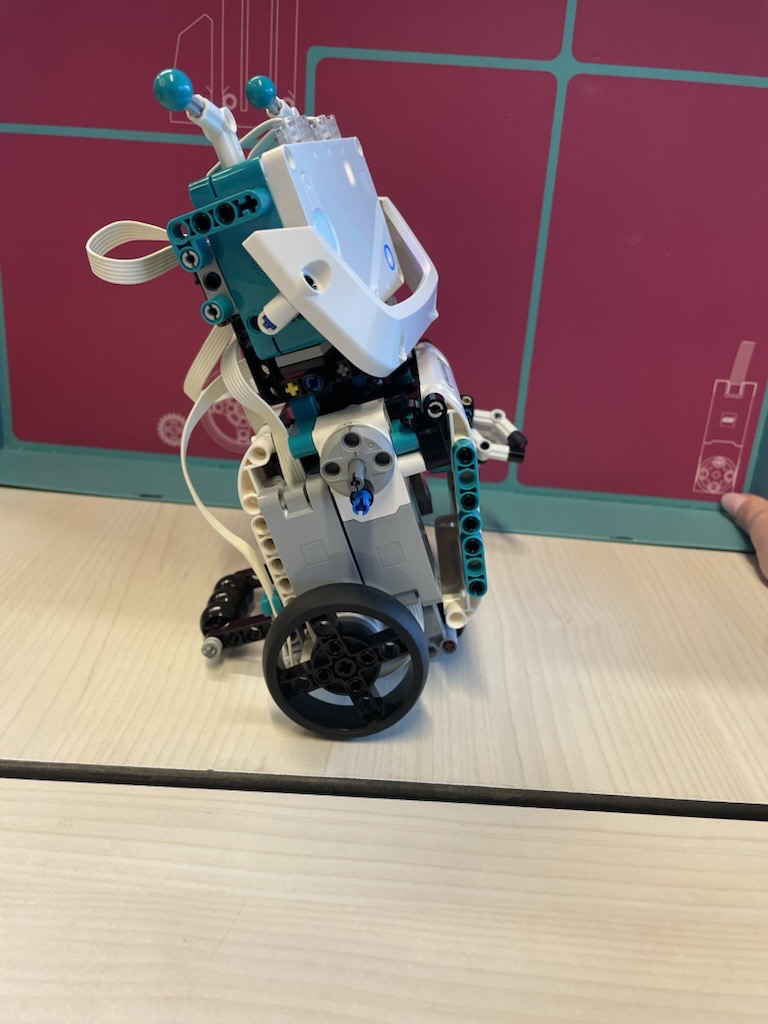
De beslissing was pijnlijk: Charlie moest eraan. We haalden hem helemaal uit elkaar.
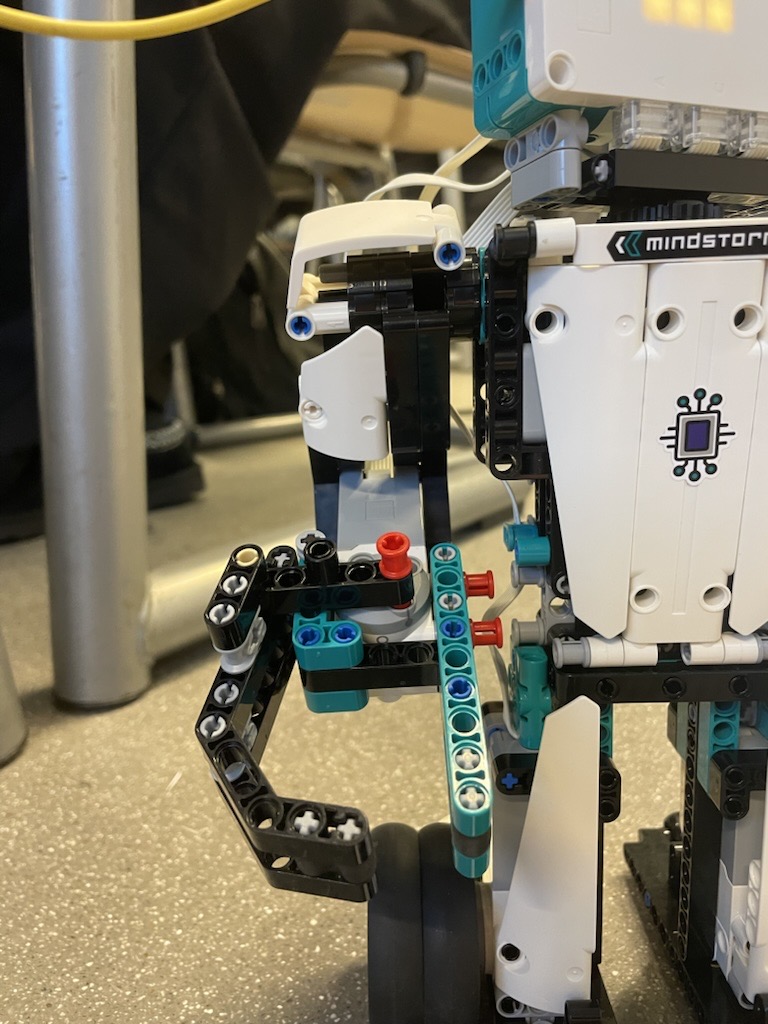
Uit de resten van Charlie bouwden we Blast.
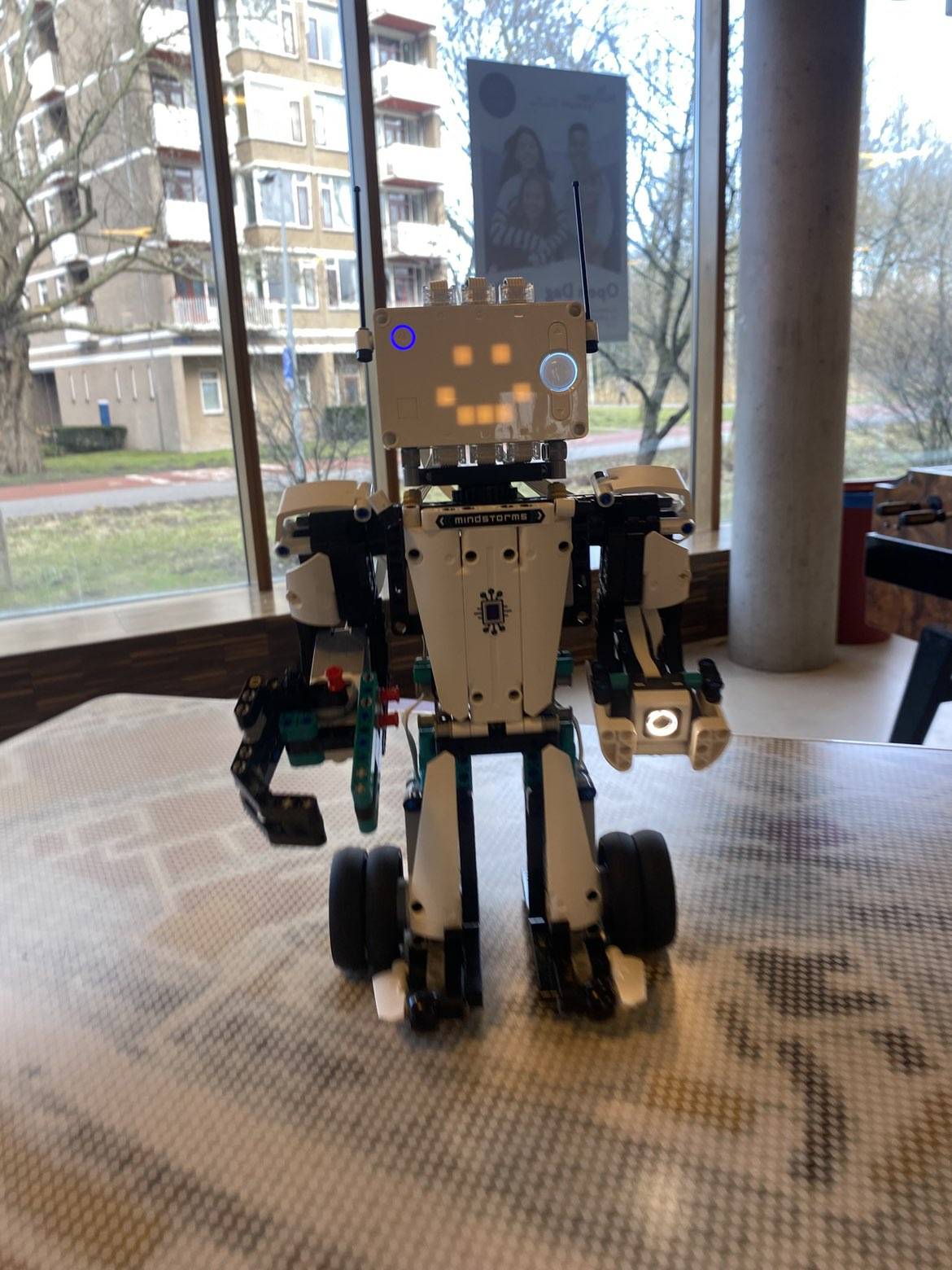
Blast had wat Charlie miste: een echte claw. Een grijpsysteem. We bouwden hem opnieuw, blok voor blok, met de claw als main goal.
Voor het eerst had onze robot handen. In theorie tenminste. Nu moesten we hem leren hoe hij die kon gebruiken.
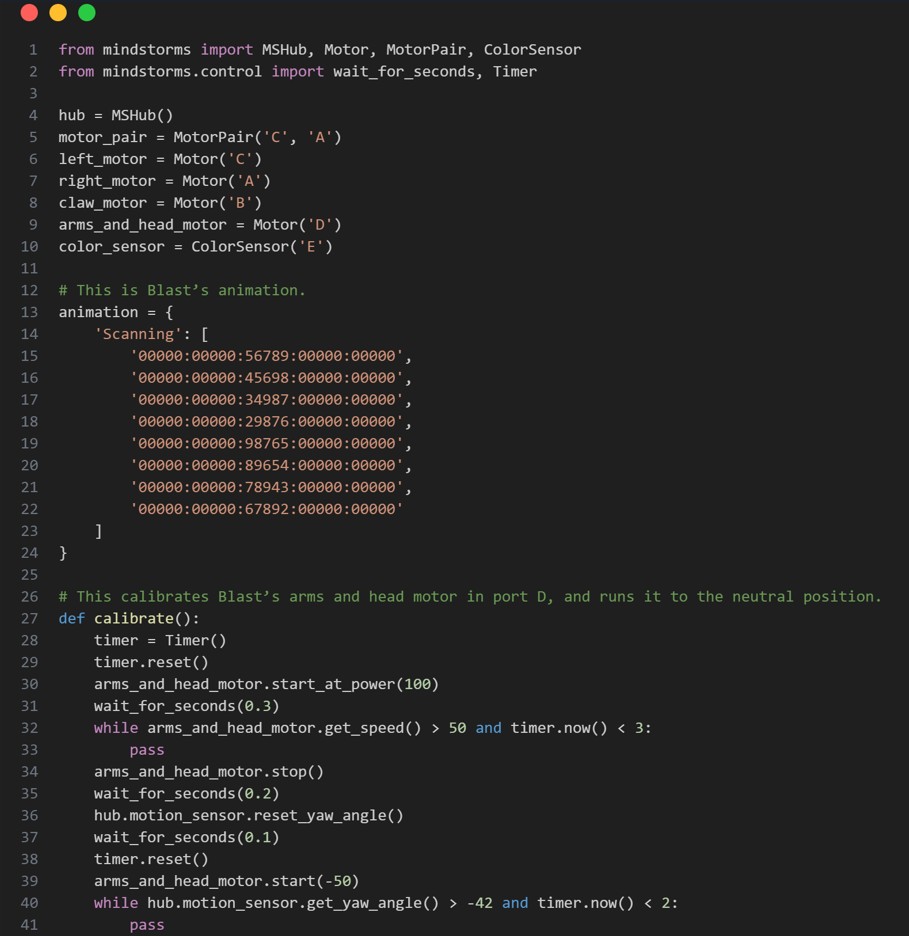
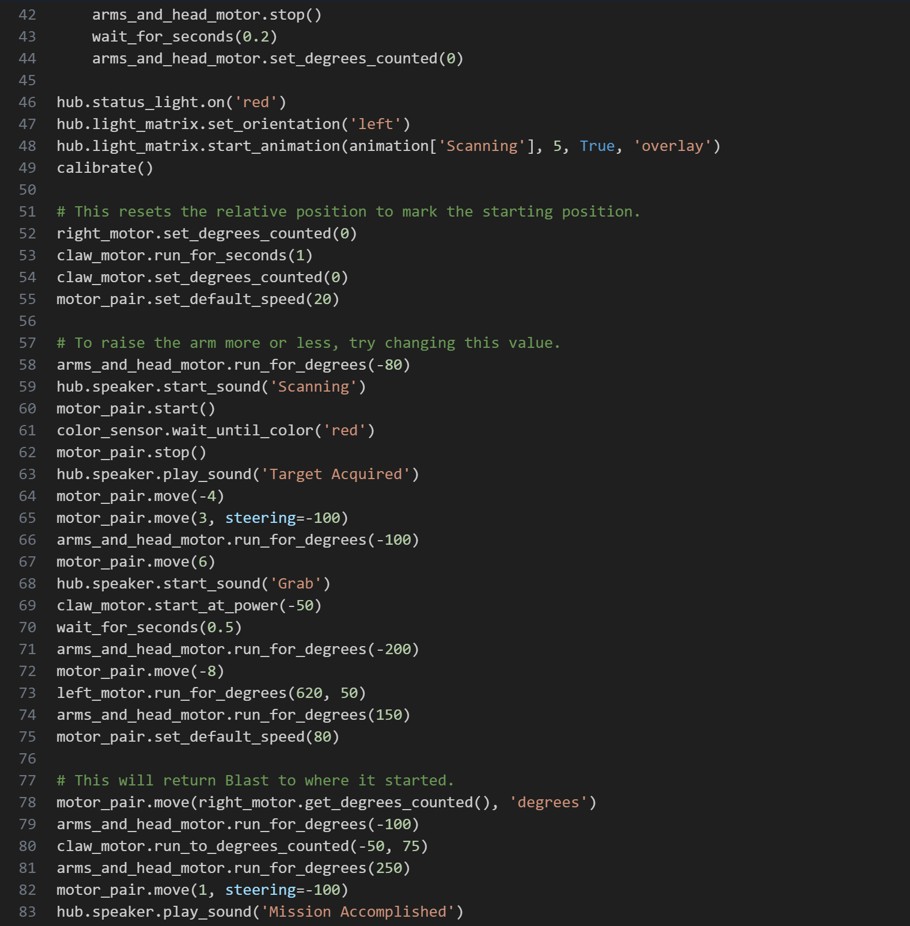
De eerste grab & move code.
We schreven onze eerste code om de claw te laten grijpen en bewegen. In theorie zou dezelfde code altijd hetzelfde resultaat moeten geven, maar...
Toen werkte het Soms. Op sommige momenten pakte Blast de beker netjes op. We keken elkaar aan blij, maar toen liet hij ze vallen of deed hij dat de volgende keer niet.
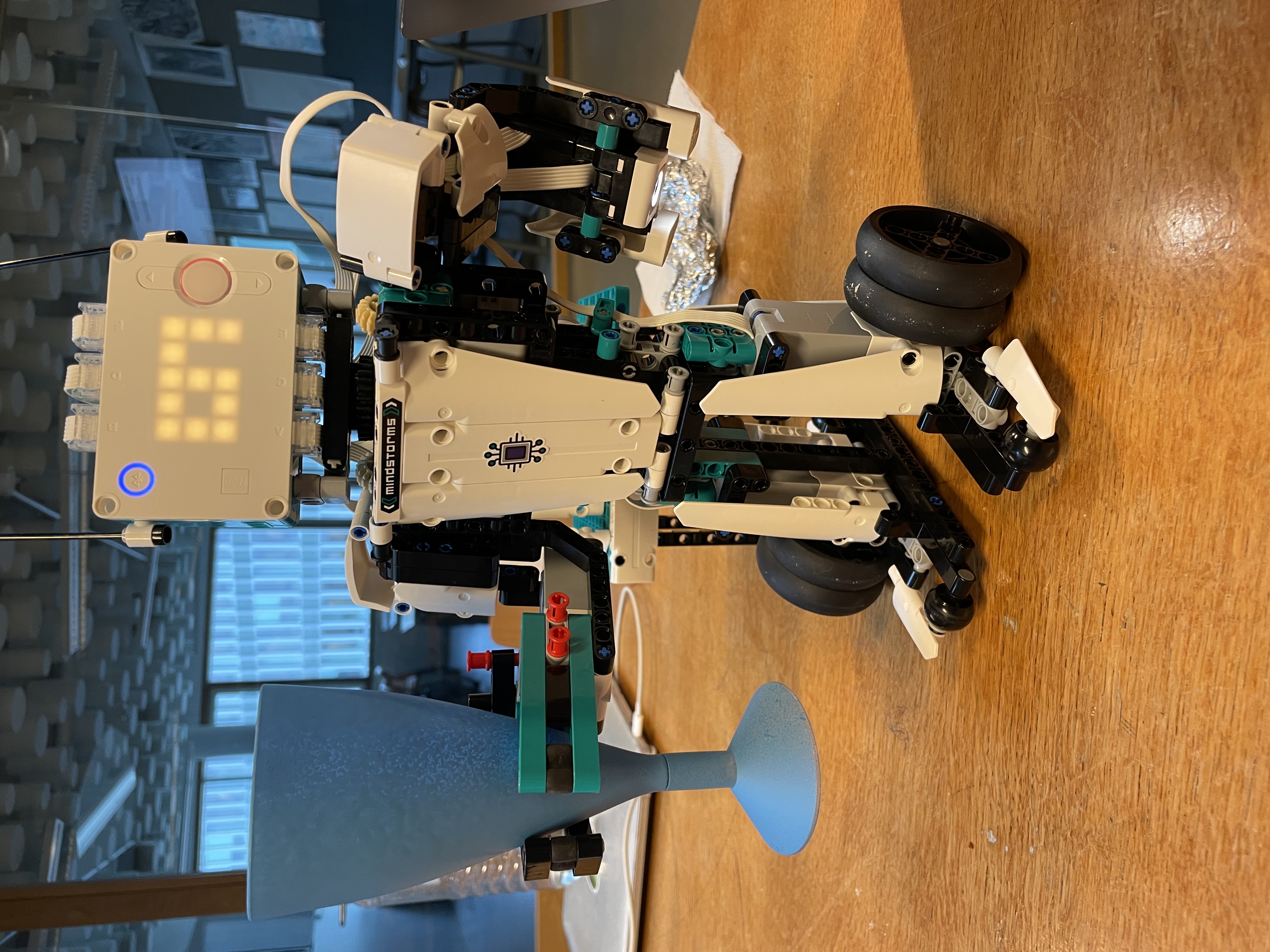


Blauw en roze.
We hadden de bekers een kleur gegeven zodat hij deze uiteindelijk later zou herkennen. Maar eerst moesten we de grab and move wel laten werken voordat dat kon gebeuren.
Dat gebeurde niet. Maar er was nog hoop voor later.
We ontdekten de ML-optie. En daarna de dissapointment.
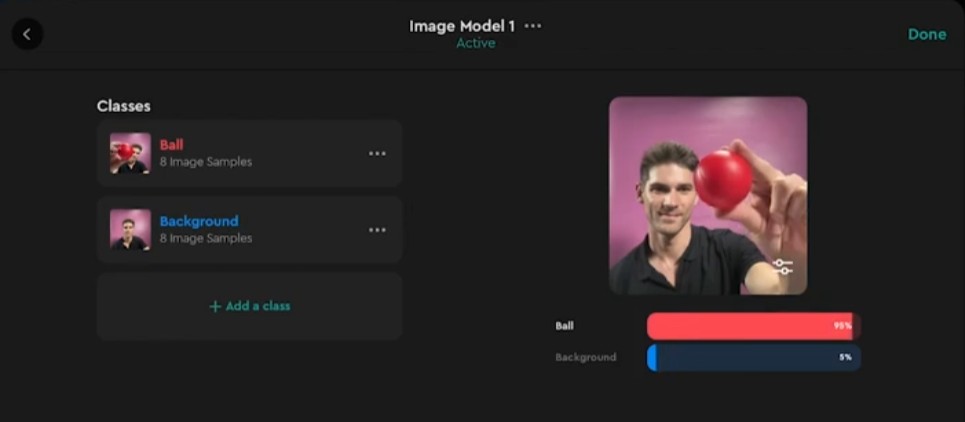
In Mindstorms zit een machine learning functie, de robot kon kleuren herkennen. Precies wat we nodig hadden! We trainden het model. Blauw en Roze. Tientallen keren denkend dat het gaat werken.
Maar het ML-model werkt alleen via de camera van de tablet/laptop, niet via een sensor op de robot zelf. De robot ziet zelf niets. Dit is echt kansloos.